Tag: robótica
-
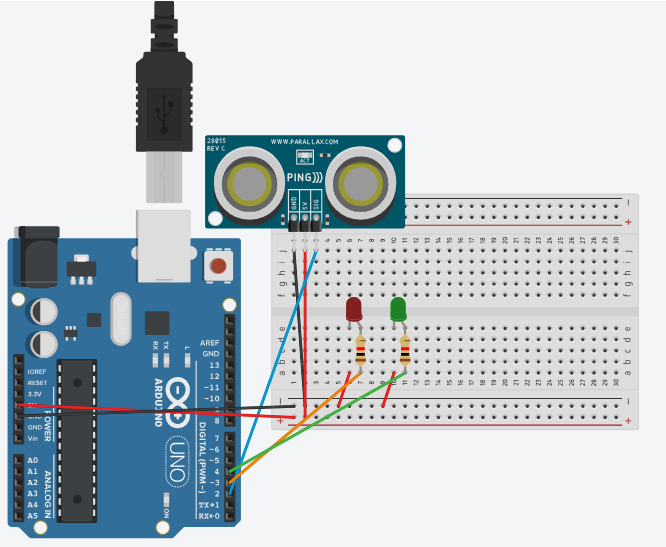
Sensor ultrassônico
YouTube: Código: // C++ code// define sig 2 float distancia;int led_vermelho = 3;int led_verde = 4;void inicia(); void setup(){Serial.begin(9600);pinMode(led_vermelho, OUTPUT);pinMode(led_verde, OUTPUT);} void loop(){inicia();distancia = distancia/2;distancia = distancia*0.034029;Serial.print(“Distancia em CM: “);Serial.println(distancia);delay(1000); if (distancia < 20){digitalWrite(led_vermelho, HIGH);digitalWrite(led_verde, LOW);} else {digitalWrite(led_vermelho, LOW);digitalWrite(led_verde, HIGH); }} void inicia(){pinMode(sig, OUTPUT); // define o pino como saidadigitalWrite(sig, HIGH); // mandando sinal para…
-
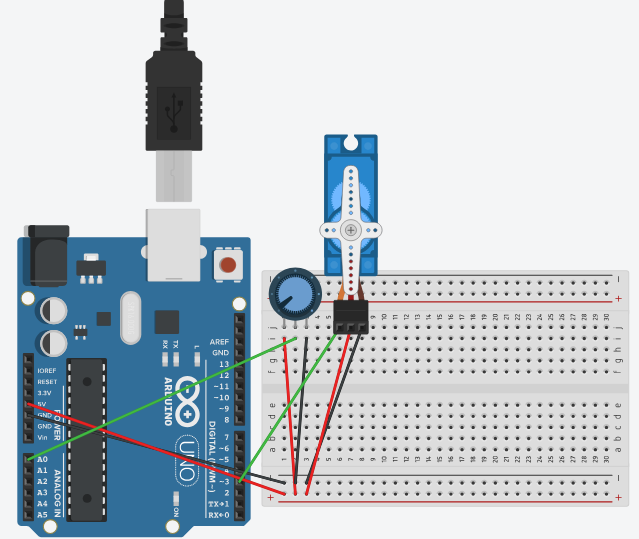
Servo Motor com potenciômetro
YouTube: Código: // C++ code// include define potenciometro A0 Servo servo1;float sensor;float valor; void setup(){pinMode(potenciometro, INPUT);servo1.attach(3);servo1.write(0);Serial.begin(9600);} void loop(){sensor = analogRead(potenciometro);valor = (map(sensor, 0, 1023, 0, 180));Serial.print(“Valor do potênciometro é: “);Serial.println(valor);servo1.write(valor);}
-
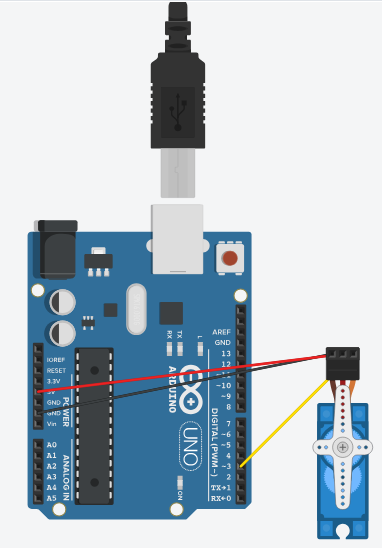
Servo Motor Arduino
Youtube: Código: // C++ code// include Servo servo1; void setup(){servo1.attach(3);servo1.write(0);} void loop(){servo1.write(0);delay(500);servo1.write(50);delay(500);servo1.write(100);delay(500);servo1.write(150);delay(500);servo1.write(180);delay(500);}