Jorge Carneiro Tecnologias
-
Nextcloud: Use Disco Externo/Secundário para Armazenamento!
Youtube: Precisa de mais espaço no seu Nextcloud? Neste tutoria, mostro como mover os dados do Nextcloud para um disco externo ou secundário, liberando espaço no disco principal. Aprenda a adicionar o disco ao sistema, criar partição, formatar, criar ponto de montagem e editar o fstab para que o disco seja montado automaticamente. Também mostro…
-
WordPress no Debian 12: Instalação Completa do Zero ao Site no Ar
Youtube: Pré-requisitos: LAMP: Linux, Apache, Mysql, PHP (link para o LAMP) Neste tutorial demonstro todo o processo de instalção e configuração do wordpress no debian 12: Acesse o terminal como root. Navege até a pasta do servidor web:cd /var/www/html/ Faça download do wordpress:wget https://wordpress.org/latest.zip Descompacte o arquivo latest.zip:unzip latest.zip.1 Acesse seu banco de dados:mysql -uroot…
-

Instalação do NextCloud Debian 12
Acompanhe no Youtube: Neste tutorial demonstro o processo de instalação do nextcloud no debian 12.Pré-requisitos: LAMP (Linux, Apache, Mysql, PHP). Instalão do UFW Firewall: sudo apt install ufw Liberando OpenSSH e WWWsudo ufw allow OpenSSHsudo ufw allow “WWW Full” Ativando e reiniciando o firewall:sudo ufw enablesudo ufw reload Instalando os modulos PHP:apt install -y php…
-
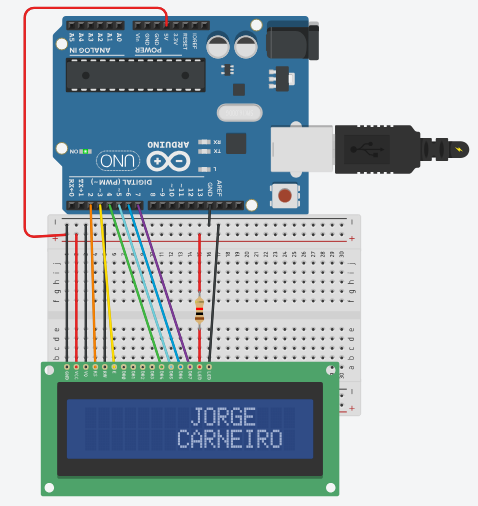
LCD 16×2 Arduino
Youtube: Código: // C++ code// include LiquidCrystal lcd(2, 3, 4, 5, 6, 7); void setup(){lcd.begin(16, 2);lcd.clear();} void loop(){lcd.setCursor(1, 0);lcd.print(“JORGE”);lcd.setCursor(0, 1);lcd.print(“CARNEIRO”);lcd.scrollDisplayLeft();}
-

Display LCD I2C
YouTube: Código: // C++ code// include Adafruit_LiquidCrystal lcd_1(0); void setup(){lcd_1.begin(16, 2);} void loop(){lcd_1.setCursor(0, 0);lcd_1.print(“JORGE CARNEIRO”);lcd_1.setCursor(2, 1);lcd_1.print(“INFORMATICA”);lcd_1.scrollDisplayRight();// delay(500);}
-
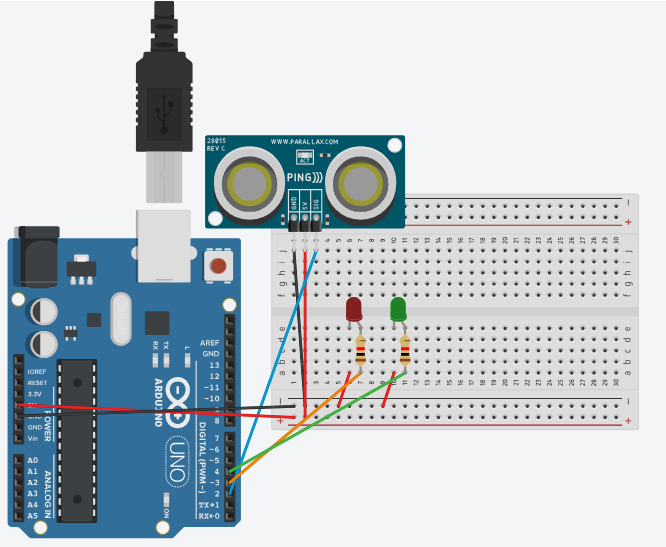
Sensor ultrassônico
YouTube: Código: // C++ code// define sig 2 float distancia;int led_vermelho = 3;int led_verde = 4;void inicia(); void setup(){Serial.begin(9600);pinMode(led_vermelho, OUTPUT);pinMode(led_verde, OUTPUT);} void loop(){inicia();distancia = distancia/2;distancia = distancia*0.034029;Serial.print(“Distancia em CM: “);Serial.println(distancia);delay(1000); if (distancia < 20){digitalWrite(led_vermelho, HIGH);digitalWrite(led_verde, LOW);} else {digitalWrite(led_vermelho, LOW);digitalWrite(led_verde, HIGH); }} void inicia(){pinMode(sig, OUTPUT); // define o pino como saidadigitalWrite(sig, HIGH); // mandando sinal para…
-
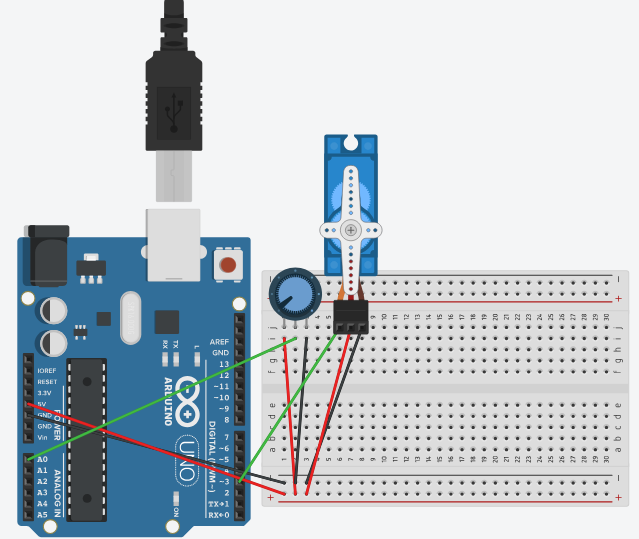
Servo Motor com potenciômetro
YouTube: Código: // C++ code// include define potenciometro A0 Servo servo1;float sensor;float valor; void setup(){pinMode(potenciometro, INPUT);servo1.attach(3);servo1.write(0);Serial.begin(9600);} void loop(){sensor = analogRead(potenciometro);valor = (map(sensor, 0, 1023, 0, 180));Serial.print(“Valor do potênciometro é: “);Serial.println(valor);servo1.write(valor);}
-
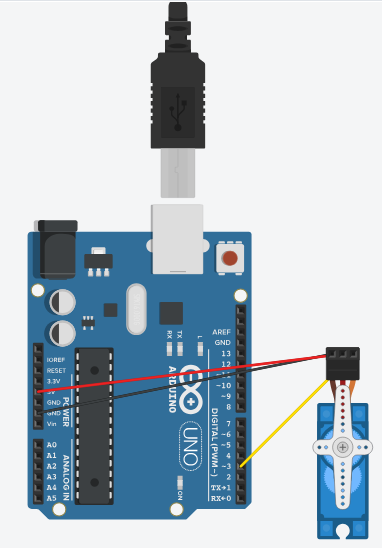
Servo Motor Arduino
Youtube: Código: // C++ code// include Servo servo1; void setup(){servo1.attach(3);servo1.write(0);} void loop(){servo1.write(0);delay(500);servo1.write(50);delay(500);servo1.write(100);delay(500);servo1.write(150);delay(500);servo1.write(180);delay(500);}
-
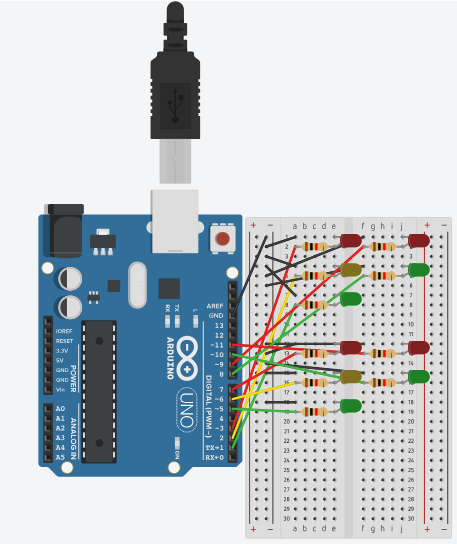
Semáforo com cruzamento e pedestres
YouTube: Código: // C++ code////semaforo 1int verde1 = 1;int amarelo1 = 2;int vermelho1 = 3; //semaforo 2int verde2 = 5;int amarelo2 = 6;int vermelho2 = 7; //Pedestre 1int p1verde = 8;int p1vermelho = 9; //Padestre 2int p2verde = 10;int p2vermelho = 11; void setup(){//Modo pinos semaforo 1pinMode(vermelho1, OUTPUT);pinMode(amarelo1, OUTPUT);pinMode(verde1, OUTPUT); //Modo pinos semaforo 2pinMode(vermelho2, OUTPUT);pinMode(amarelo2,…
-
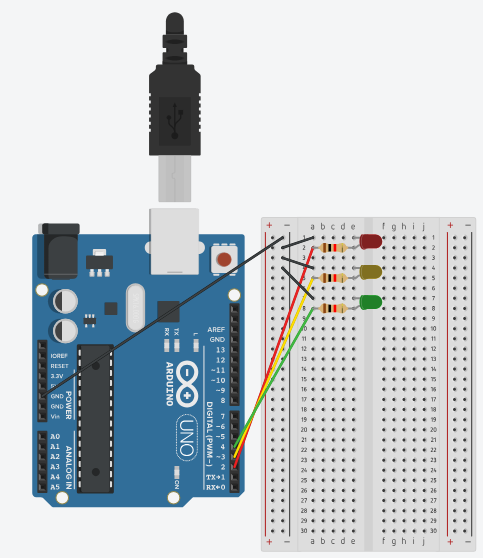
Semáforo Arduino
YouTube: Código: // C++ code//// define variaveis com o valor dos pinos (para chamar por cor)int verde = 4;int amarelo = 3;int vermelho = 2;void setup(){//define os pinos como saídapinMode(verde, OUTPUT);pinMode(amarelo, OUTPUT);pinMode(vermelho, OUTPUT);} void loop(){digitalWrite(verde, HIGH);delay(1000); // Wait for 1000 millisecond(s)digitalWrite(verde, LOW);digitalWrite(amarelo, HIGH);delay(1000); // Wait for 1000 millisecond(s)digitalWrite(amarelo, LOW);digitalWrite(vermelho, HIGH);delay(1000); // Wait for 1000 millisecond(s)digitalWrite(vermelho,…
Tem alguma recomendação?